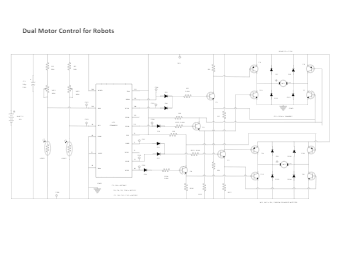
Shown here is a simple circuit that can drive the two motors of a small robot, allowing the robot to negotiate an obstacle course.Two light sensitive resistors (LDR) are used to detect obstacles and drive the motor accordingly to avoid obstacles automatically.Two H-bridge motor circuits are used to drive each motor forward or backward or to stop, respectively.