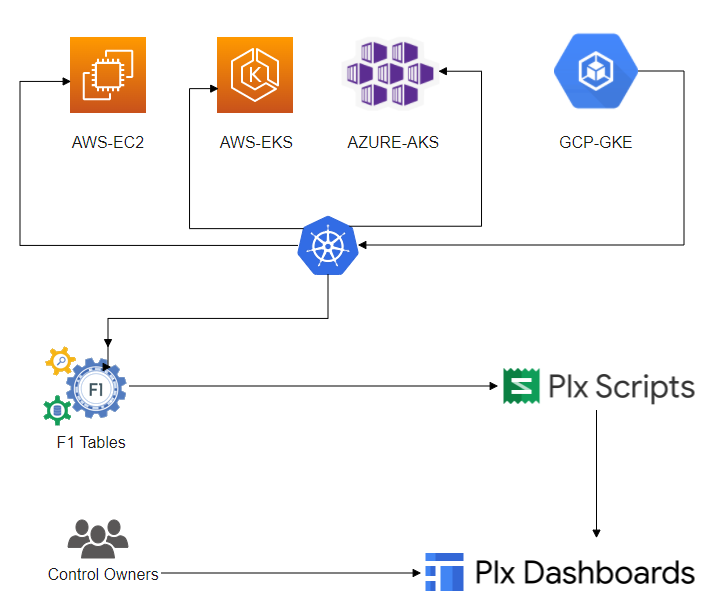
This is a UML modeling of Control-2467 Propose Architecture. A meta-system and an object system are distinguished in the proposed design. The suggested architecture approximates the inverse system dynamics for a given trajectory following task and needs no previous knowledge of the system dynamics.